Loading...
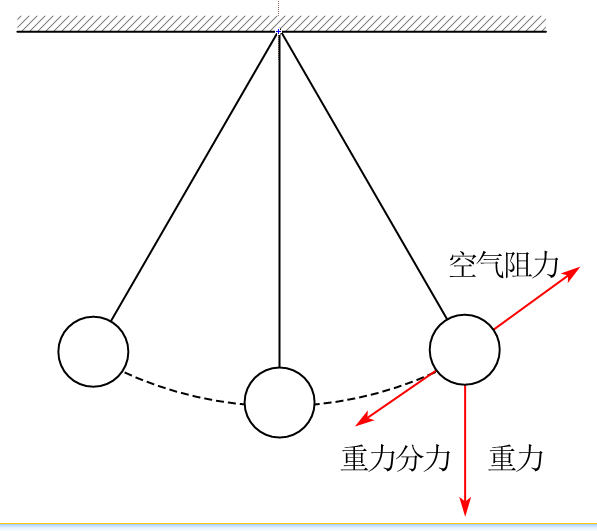
从单摆到PID控制单摆系统本身就是一个负反馈系统,将悬挂的小球抬高一定高度,然后放手,单摆来回摆动(如果没有风的情况下),最后会回到理想稳定状态的位置并静...
1.simulink通过数学微分方程,在simulink中建立模型2.simscape通过simscape里的物理模型,直接建立模型3.传递函数通过mat...