Loading...
公式又称$\alpha -\beta$滤波器预测说明$\alpha$ 代表测量值的置信度,如果它很大,则...
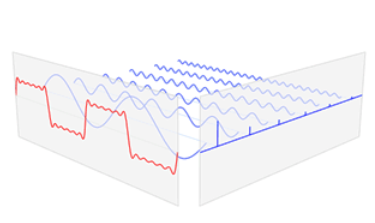
傅里叶级数任何周期函数都可以看昨是不同振幅,不同相位正弦波的叠加。将该公式换一种理解,该公式的意义在于将...