Loading...
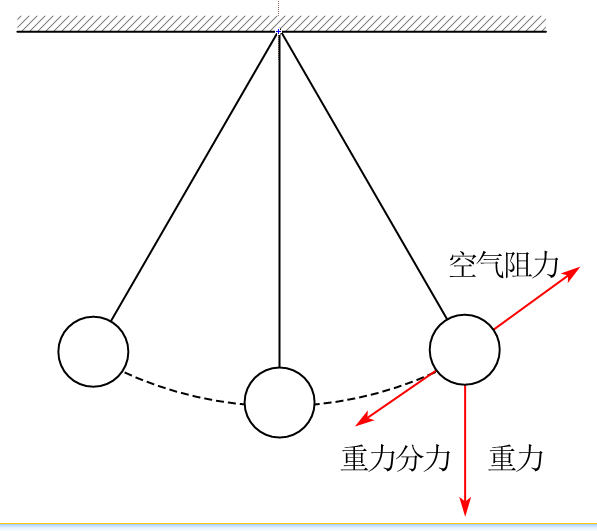
从单摆到PID控制单摆系统本身就是一个负反馈系统,将悬挂的小球抬高一定高度,然后放手,单摆来回摆动(如果没有风的情况下),最后会回到理想稳定状态的位置并静...
惯性系牛顿定律成立的参考系称作惯性参考系,一切相对于惯性系做匀速直线运动或者静止的参考系也是惯性系非惯性系牛顿定律不成立的参考系,一切相对于惯性系有加速度的参考系是非惯性系。举例说明地球上的物体,以地球作为参考系,地球参考系是惯性系,地球上的一辆车正在匀速行驶,此时车中的人以汽车为参考系,汽车也是惯性系,若是汽车匀加速行驶,此时以汽车为参考系,则汽车是非惯性系。若以汽车为参考系,若该参考系为...
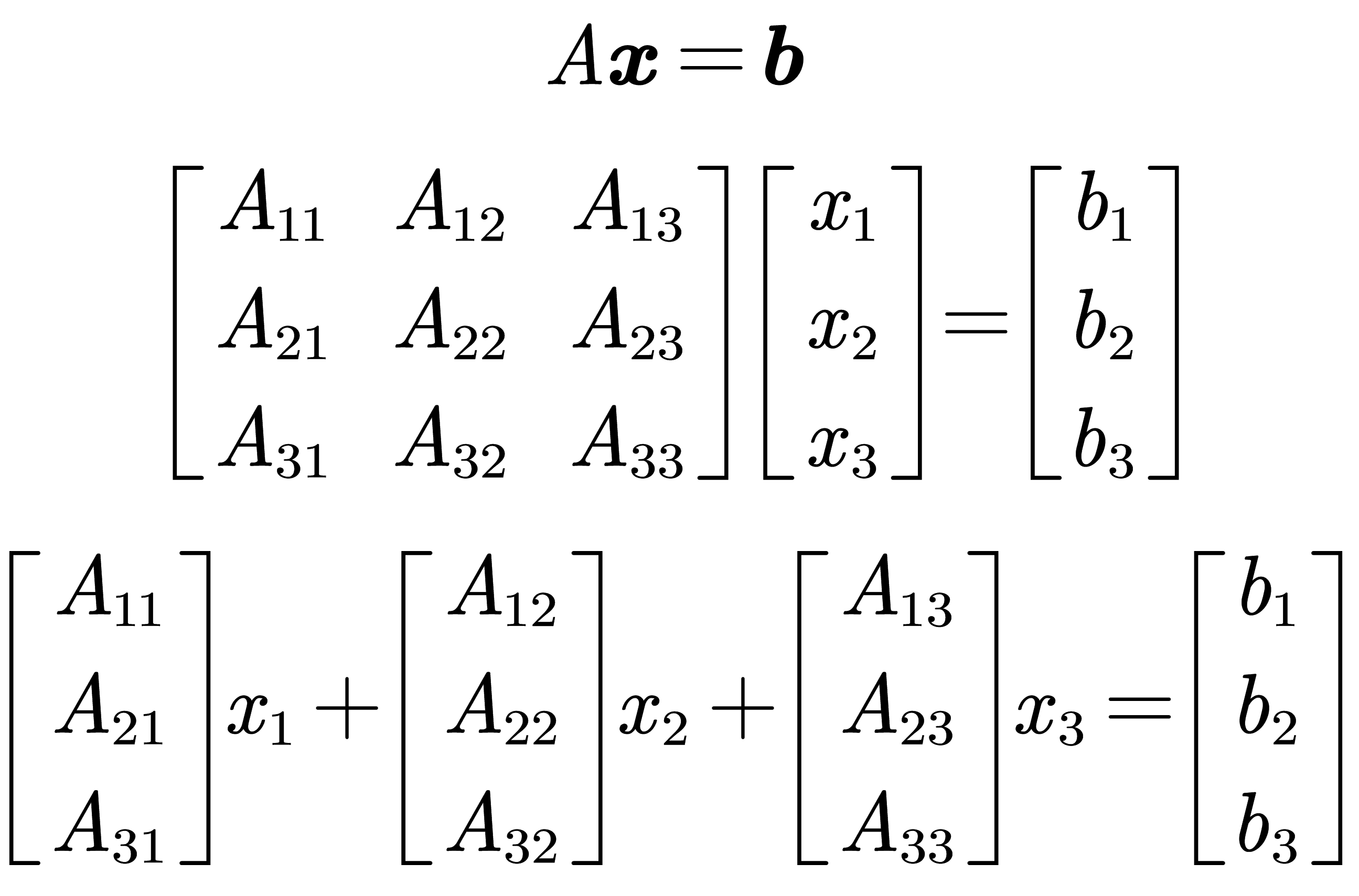
将同理,通过观察进行推广(增加列,增加行),可以发现,对于两个矩阵相乘,既可以看做行的加法,也可以看做列的加法。
1.simulink通过数学微分方程,在simulink中建立模型2.simscape通过simscape里的物理模型,直接建立模型3.传递函数通过mat...
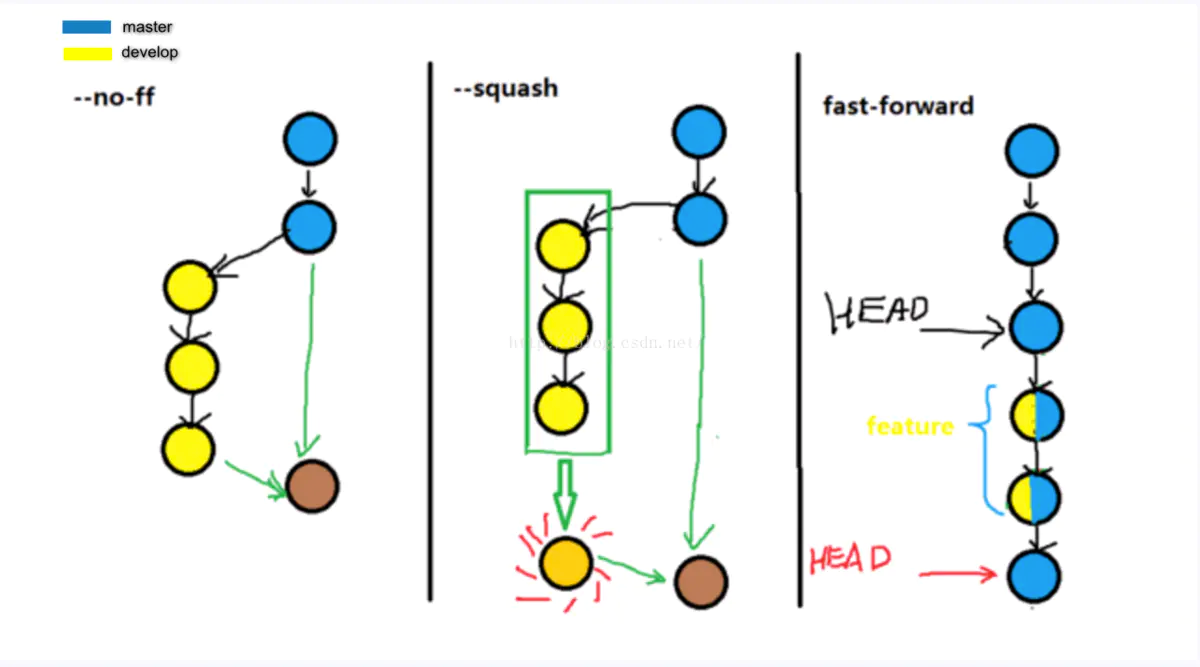
图示名次解释origin 默认远程仓库名命令命令作用git clone git@github.com:UserName/projectName.git克...